1 – Introdução
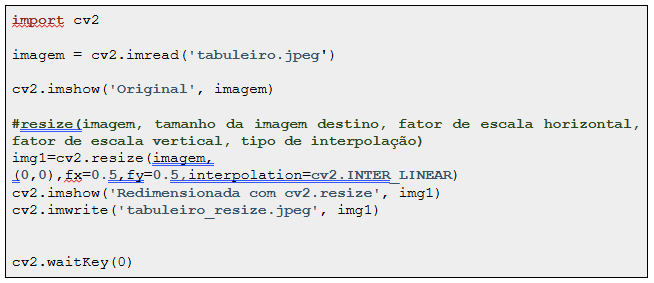
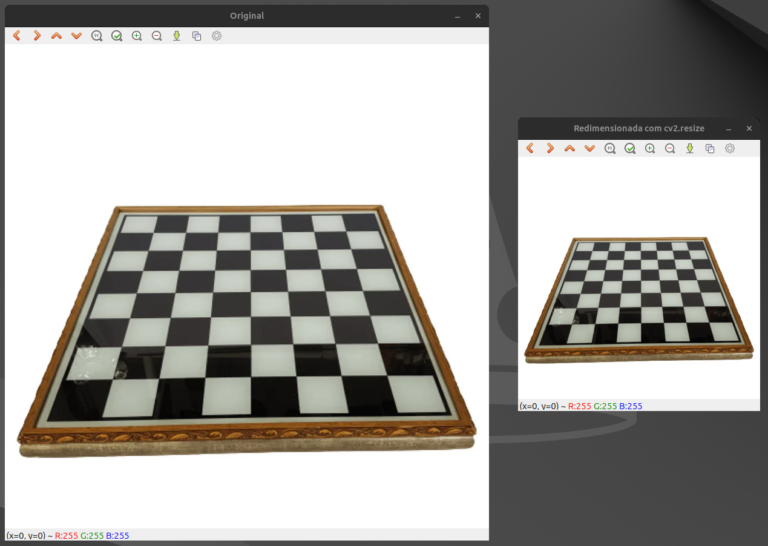
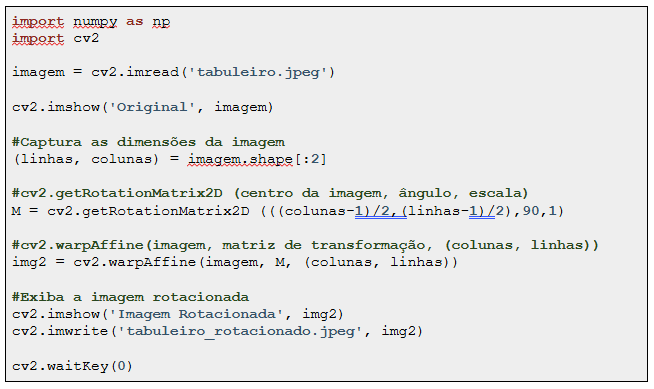
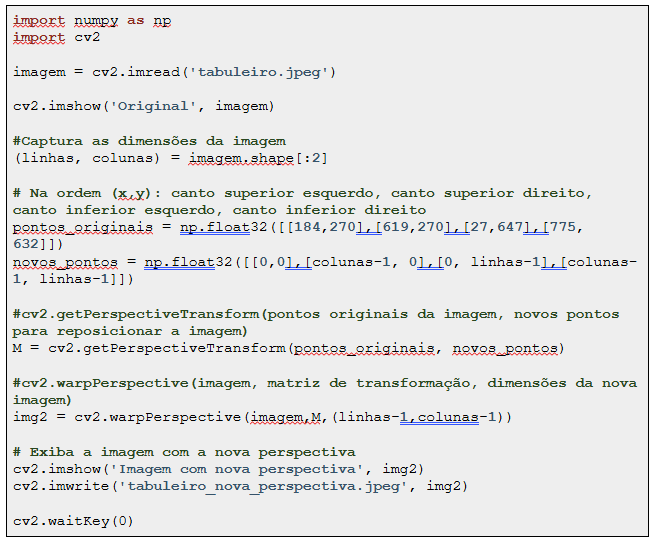
No artigo anterior foi explicado como configurar o ambiente e fazer as primeiras edições em uma imagem gerada via código utilizando OpenCV. Neste artigo serão apresentadas algumas funções que aplicam algum efeito sobre imagens, como filtros de suavização e transformações geométricas.
2 – Suavizar (Blur)
A suavização de imagens é geralmente utilizada para redução de ruídos e para isso é aplicado, através da convolução, um filtro que remove sinais de alta frequência da imagem (filtro passa-baixa). Nesta biblioteca podemos encontrar até 4 funções para desfoque, são elas:
- cv2.blur() – é um filtro linear que substitui cada pixel da imagem pelo valor médio dos pixels vizinhos.
- cv2.GaussianBlur() – é um filtro linear que usa uma distribuição Gaussiana para calcular os pesos dos pixels vizinhos.
- cv2.medianBlur() – é um filtro não linear que substitui cada pixel da imagem pelo valor mediano dos pixels vizinhos.
- cv2.bilateralFilter() – é um filtro não linear que combina a suavização espacial com a suavização de intensidade
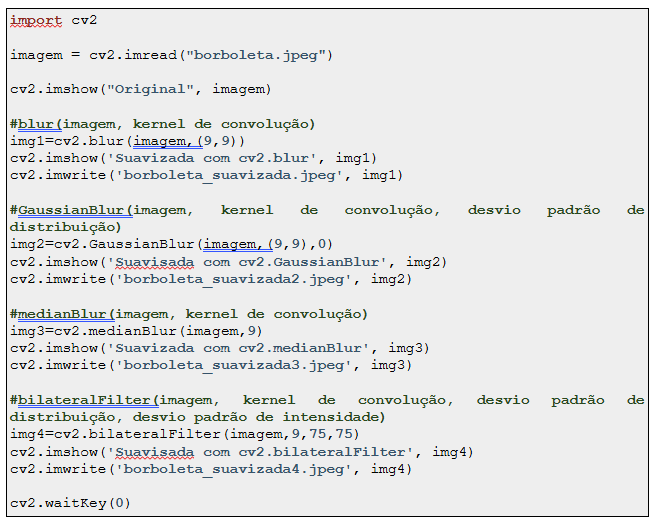
O kernel de convolução nada mais é que uma matriz com dimensões pequenas que é aplicada em cada pixel da imagem para gerar um efeito na imagem, como a suavização que é descrita neste tópico. Abaixo é possível ver as imagens resultantes dos filtros realizados: